Журнал «Травма» Том 10, №4, 2009
Вернуться к номеру
Биомеханическое обоснование эффективности использования механических навигационных устройств при интрамедуллярном остеосинтезе

Авторы: С.В.Билык, В.М.Василов, И.С.Олексюк, Д.К.Леник, А.Г.Шайко-Шайковский - Буковинский государственный медицинский университет, Черновицкий национальный университет им. Ю. Федьковича, Черновцы, Украина
Рубрики: Травматология и ортопедия
Разделы: Клинические исследования
Версия для печати
В работе для правильного выбора технологии лечения переломов длинных костей проведена оценка эффективности использования того или иного типа фиксирующих интрамедуллярных систем для остеосинтеза и навигационного устройства для их проведения. Полученные с помощью предложенной математической модели расчётным путём результаты позволяют оценить пригодность выбранной конструкции навигационного устройства для реализации остеосинтеза.
В роботі для правильного вибору технології лікування переломів довгих кісток проведена оцінка ефективності використання того чи іншого типу фіксуючих інтрамедулярних систем для остеосинтезу та навігаційного пристрою для її проведення. Отримані за допомогою запропонованої математичної моделі розрахунковим шляхом результати дозволяють оцінити придатність обраного пристрою для реалізації остеосинтезу.
The paper provides the evaluation of the usage of different types of fixation intramedullary systems for osteosynthesis and navigation devices for the purpose of the right choice in long bone fractures treatment. The results obtained with the help of the chosen mathematical calculation model allow to estimate the suitability of the chosen construction of navigation device for osteosynthesis.
остеосинтез, навигационное устройство, математическая модель
остеосинтез, навігаційний пристрій, математична модель
osteosynthesis, navigation device, mathematical model
Использующиеся в настоящее время навигационные механические устройства и приспособления, используемые при интрамедуллярном остеосинтезе переломов длинных костей, зачастую оказываются мало эффективными. Длительность этапа операции, при котором используется навигационное устройство, занимает большую часть времени всего оперативного вмешательства в целом, увеличивается длительность пребывания больного под наркозом.
Трудности, связанные с увеличением продолжительности оперативного вмешательства, связаны с неточностями попадания блокирующих и фиксирующих винтов в специальные отверстия в корпусе интрамедуллярных фиксаторов, а также с необходимостью точного попадания и последующего введения фиксирующих и блокирующих элементов конструкции в окна-прорези, заполненные полимером в корпусах интрамедуллярных фиксаторов (серии КМПФ).
Это обстоятельство является причиной, объясняющей существование в настоящее время довольно большого числа конструкций навигационных устройств. Несовершенство имеющихся конструкций постоянно стимулирует появление новых моделей [1,2].
Материал и методы
Факторами, препятствующими успешной реализации интрамедуллярного остеосинтеза, является деформативность (в упругой стадии) самого навигационного устройства и его отдельных частей: деформативность спицы или стержня-направителя, наличие определённых неизбежных технологических зазоров между сопрягаемыми элементами устройства, допусков на изготовление деталей конструкции.
Немаловажными факторами являются также специфика самой операции, зависящая от характера и вида перелома, расположения места и направления введения фиксирующих или блокирующих элементов биотехнической системы, вид и тип перелома, квалификация и опыт врача, осуществляющего операцию [2].
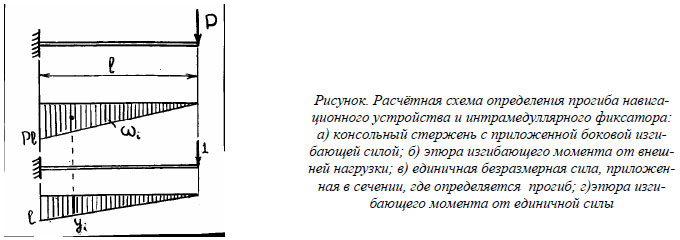
Использование электронно-оптических преобразователей (ЭОП) остаётся прерогативой крупных областных и городских клиник. Положение осложняется также тем, что транспортировка пострадавших из районных больниц в крупные технически оснащённые лечебные учреждения не всегда возможна. В связи с этим в работе предложена методика определения прогибов консольного стержня, базирующаяся на энергетической теории оценки перемещений в упругих системах. На рисунке представлено схематическое изображение корпуса интрамедуллярного фиксатора, спицы-направителя, штанги навигационного устройства, деформативность которых может быть оценена по методу расчёта с использованием указанной расчётной схемы.
Проведена биомеханическая оценка деформативности (в области упругих деформаций) основных элементов традиционно использующихся механических навигационных устройств и сопоставление полученных на основе предложенной математической модели расчётных величин деформаций с размерами отверстий и окон в корпусах интрамедуллярных фиксаторов, куда должны быть направлены фиксирующие и блокирующие элементы.
Результаты и обсуждение
Расчётная схема направляющей спицы, направляющего стержня или самого корпуса интрамедуллярного фиксатора представляет собой консольно закреплённый стержень (рис.1) [3].
Сечение направляющего элемента навигационного устройства и интрамедуллярного фиксатора принято круглым. Осевой момент инерции для такой формы сечения определиться по формуле:
I х = πd4/64, (1)
где d – диаметр стержня.
Прогиб конца консольного стержня определится с помощью интегралов Мора или графоаналитическим методом по формуле Верещагина:
δ = Σ ωi yi / EI (2)
где: δ – прогиб рассматриваемого сечения стержня;
ω – площадь эпюры изгибающих моментов;
y - ордината на единичной эпюре, расположенная под центром тяжести силовой эпюры;
EI - жёсткость стержня (Е - модуль упругости, I – осевой момент инерции);
і = 1,2,3,…..n – число грузовых участков в рассматриваемом элементе конструкции.
Выражение (2) после преобразований даёт формулу для определения прогиба конца консольного стержня при действии на него силы Р:
δ = Рl3/3 EI. (3)
Определим значение допустимой величины изгибающей силы Р, не вызывающей в материале конструкции остаточных деформаций. Из условия прочности при изгибе
σ = М max / w х ≤ [σ], (4)
где: σ – действующие нормальные напряжения;
[σ] – допустимые значения нормальных напряжений для материала конструкции;
Мmax – величина изгибающего момента в опасном сечении;
wх - осевой момент сопротивления поперечного сечения рассматриваемого элемента конструкции.
Поскольку М max = Рl (l – длина рассматриваемого элемента навигационного устройства, рис.1а), а осевой момент сопротивления
W х = πd3/32, (5)
подставляя в выражение (4) после преобразования получим:
Р ≤ πd3 [σ] / 32 l (6)
- выражение для определения допустимой сгибающей силы, не вызывающей пластических деформаций в элементах конструкции навигационного устройства.
Из выражения (6) следует, что величина допустимой сгибающей силы Р = f ( d, l ) – т.е. зависит от диаметра и длины элемента конструкции [4].
Поскольку медицинский инструментарий изготавливается из биоинертной стали 12Х18Н9Т, модуль упругости I рода в расчётах принят: Е=2·106 кг/см2, а основное допустимое напряжение [σ] = 3600-5870 кг/см2. Подставляя в выражение (6) нижнюю границу величины допустимого напряжения для разных li, получим соответствующие значения допустимого усилия (величины силы Р) для различных возможных значений геометрических характеристик направляющего элемента навигационного устройства (табл.1).
Используя данные таблицы 1, с помощью выражения (3) можно расчётным путём определить соответствующую величину максимальных прогибов направляющего элемента механического навигационного устройства, т.е. величину максимальных возможных «уводов» в сторону его опасного сечения, при которых в системе не возникнет остаточных (пластических) деформаций.
Для удобства анализа полученных результатов сводим их в таблицу 2.
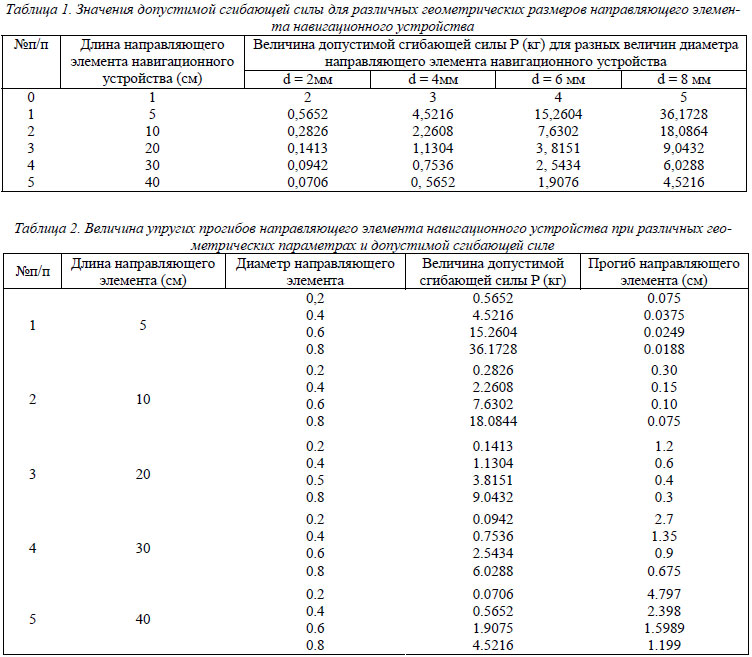
Анализ полученных расчётным путём результатов (табл.2) показывает, что «увод» в сторону направляющего элемента навигационного устройства для диаметров d = 2 – 8 мм при его различной длине l i может находиться в диапазонах:
l = 40 см δ = 1,9 - 4,8 см
l = 30 см δ = 0,68 – 2,7 см
l = 20 см δ = 0,32 – 1,2 см
l = 10 см δ = 0,075 – 0,3 см
l = 5 см δ = 0,019 – 0,075 см
Наличие технологических зазоров между сопрягаемыми элементами устройства, обусловленных допусками на точность их изготовления могут увеличить этот диапазон значений ещё больше.
Выводы
1. Полученные расчётным путём результаты дают возможность определить допустимые размеры направляющих элементов механических навигационных устройств, при которых возможно обеспечить точность введения блокирующих и фиксирующих элементов биотехнической системы при остеосинтезе.
2. Приемлемая точность введения блокирующих и фиксирующих элементов при создании интрамедуллярного остеосинтеза возможна на расстоянии l = 20 см от места крепления направляющего элемента навигатора при его диаметре d = 6- 8 мм; на расстоянии l = 30 см - при d = 8 мм.
3. При расстоянии l = 40 см до места крепления направляющего элемента навигационного устройства при его диаметре d=8 мм необходимая точность введения блокирующих или фиксирующих элементов в отверстия и прорези интрамедуллярных конструкций обеспечена быть не может в силу конструктивных особенностей устройства. В этих случаях необходимо использование навигационных устройств с такой конструктивной компоновкой, которая позволит обеспечить высокую жёсткость конструкции и, тем самым, требуемую точность.
- Остеосинтез. Руководство для врачей / Под ред. С.С.Ткаченко,- Л.: Медицина, 1987.-272 с.
- Справочник по травматологии и ортопедии / Под ред. А.А.Коржа и Е.П.Межениной.- К.: Здоров’я-1980.-216с.
- Анурьев В.И. Справочник конструктора-машинострооителя, том 1.-М.: Машиностроние,1974.-416с.
- Справочник технолога-машиностроителя в 2-х т. / под ред. А.Г.Косиловой, Р.К.Мещерякова.-М.: Машиностроение,1985.-496 с.