Журнал «Травма» Том 15, №2, 2014
Вернуться к номеру
Моделирование работы мышц, обеспечивающих горизонтальное равновесие таза при одноопорном стоянии
Авторы: Тяжелов А.А., Карпинский М.Ю., Гончарова Л.Д., Лобанов Г.В., Боровой И.С. - ГУ «Институт патологии позвоночника и суставов им. проф. М.И. Ситенко НАМН Украины», г. Харьков; Донецкий национальный медицинский университет им. М. Горького
Рубрики: Травматология и ортопедия
Разделы: Справочник специалиста
Версия для печати
В работе методом математического моделирования рассчитаны силы и моменты сил мышц поясницы, таза и нижней конечности, обеспечивающие горизонтальное равновесие таза. В отличие от ранее выполненных работ, кроме мышц «чистых» (облигатных) абдукторов, в расчетной схеме учтено действие всех других мышц, вектор действия которых расположен латеральнее центра вращения таза при одноопорном стоянии. К факультативным абдукторам мы отнесли грушевидную, подвздошно-поясничную, портняжную мыщцы, прямую порцию четырехглавой мышцы и переднюю порцию большой ягодичной мышцы.
В основу расчетов положена концепция сохранения горизонтального равновесия таза за счет работы исполнительного механизма в виде мышечного аппарата, посредством тяговых усилий, развиваемых отдельными мышцами. Регулирование действий исполнительного механизма осуществляется центральной нервной системой, которая генерирует управляющие сигналы, представляющие собой функции регулирования, изменяющиеся во времени. Различные рецепторы осуществляют как внешний (информация об окружающей среде и положении тела в ней), так и внутренний контроль (состояние самой системы и ее элементов). На основании данных системы контроля вырабатываются коэффициенты регулирования, влияющие на величины функций регулирования.
Другими словами, при изменении одной переменной функции регулирования сохранение равновесия происходит за счет изменения других переменных.
В результате расчетов выяснилось, что облигатные абдукторы (малая и средняя ягодичные мышцы и мышца, натягивающая широкую фасцию) обеспечивают момент силы, равный 80 Н•м, что чуть более чем в 2 раза превышает момент силы гравитации (34,6 Н•м) при спокойном одноопорном стоянии. Суммарное пропорциональное сокращение факультативных абдукторов позволяет обеспечить момент силы в 66,8 Н•м, что ненамного меньше момента, создаваемого облигатными абдукторами. Суммарный момент силы всех абдукторов составит 146,8 Н•м, что более чем в 4 раза превышает момент силы гравитации. А это уже тот запас надежности, который обеспечивает горизонтальное равновесие таза даже при экстремальных динамических нагрузках.
У роботі методом математичного моделювання розраховані сили й моменти сил м’язів поперека, таза та нижньої кінцівки, що забезпечують горизонтальну рівновагу таза. На відміну від раніше виконаних робіт, крім м’язів «чистих» (облігатних ) абдукторів, у розрахунковій схемі враховано дію всіх інших м’язів, вектор дії яких розташований латеральнiше центра обертання таза при одноопорному стоянні. До факультативних абдукторів ми віднесли грушоподібний, клубово-поперековий, кравецький м’язи, пряму порцію чотириголового й передню порцію великого сідничного м’яза.
В основу розрахунків покладено концепцію збереження горизонтальної рівноваги таза за рахунок роботи виконавчого механізму у вигляді м’язового апарату, за допомогою тягових зусиль, що розвиваються окремими м’язами. Регулювання дій виконавчого механізму здійснюється центральною нервовою системою, що генерує керуючі сигнали, які являють собою функції регулювання, що змінюються в часі. Різні рецептори здійснюють як зовнішній (інформація про оточуюче середовище та положення тіла в ньому), так і внутрішній контроль (стан самої системи та її елементів). На підставі даних системи контролю виробляються коефіцієнти регулювання, що впливають на величини функцій регулювання.
Іншими словами, при зміні однієї змінної функції регулювання збереження рівноваги відбувається за рахунок зміни інших змінних.
У результаті розрахунків з’ясувалося, що облігатні абдуктори (малий і середній сідничні м’язи та м’яз, що натягує широку фасцію) забезпечують момент сили, рівний 80 Н•м, що трохи більше ніж у 2 рази перевищує момент сили гравітації (34,6 Н•м) при спокійному одноопорному стоянні. Сумарне пропорційне скорочення факультативних абдукторів дозволяє забезпечити момент сили в 66,8 Н•м, що ненабагато менше моменту, створюваного облігатними абдукторами. Сумарний момент сили всіх абдукторів становитиме 146,8 Н•м, що більше ніж у 4 рази перевищує момент сили гравітації. А це вже той запас надійності, що забезпечує горизонтальну рівновагу таза навіть при екстремальних динамічних навантаженнях.
In this paper using mathematical modeling we had calculated forces and moments of force of lumborum, pelvis and lower extremity, providing of horizontal balance of the pelvis. In contrast to works performed earlier except muscles of «pure» (obligate) abductors, in the calculation scheme we considered the action of all other muscles, vector of which is more lateral then the centre of pelvis rotation at singly-leg standing. To the optional abductor we referred piriform, iliopsoas, tailor’s muscles, straight portion of the quadriceps and anterior portion of the gluteus maximus.
The calculations were based on the concept of keeping the horizontal balance of the pelvis due to operation of the actuator in the form of muscular system by traction forces developed by individual muscles. Actuator action is regulated by the central nervous system, which generates control signals representing a control function of regulation changing with time. Various receptors perform both external (information about the environment and position of the body in it) and internal control (state of the system and its elements). Based on the data of control system, there are being produced coefficients of regulation affecting the magnitude of regulatory functions.
In other words, in changing one variable of control function, maintaining balance occurs due to changes in other variables.
The calculations revealed that obligate abductors (small and middle gluteal muscle and musculus tensor fasciae latae) provide a force moment of 80 N•m, which a little more than 2 times exceed force moment of gravity (34.6 N•m) at quiet single-leg standing. Total proportional traction of optional abductors allows providing force moment of 66.8 N•m, which is not much less the moment created by obligate abductors. The total moment of the force of all the abductor is 146.8 N•m, which is more than four times higher than the force moment of gravity. And it is that the safety margin that allows horizontal pelvic balance even under extreme dynamic loads.
Статья опубликована на с. 136-141
Введение
Если в расчетах силовых взаимодействий в области тазобедренного сустава как при двуопорном, так и одноопорном стоянии белых пятен практически не осталось благодаря работам F. Pauwels, V.T. Inman и др. [1, 2], то вопрос обеспечения горизонтального равновесия таза при одноопорном стоянии далек от своего решения. В частности, известно, что при одноопорном стоянии обеспечение горизонтального равновесия таза достигается отводящей группой мышц, которые должны обеспечить усилие, более чем в два раза превышающее вес тела [3].
Однако на практике реальная сила отводящих мышц бедра не достигает и половины веса тела. В лаборатории биомеханики ГУ «ИППС им. проф. М.И. Ситенко НАМНУ» авторами было изучено 20 протоколов биомеханического обследования здоровых лиц-волонтеров и спортсменов, не предъявлявших жалоб, которые подтвердили это наше утверждение. Следовательно, для обеспечения горизонтального равновесия таза при одноопорном стоянии необходимо подключение других мышц.
Наиболее эффективно с этой проблемой должны справляться мышцы, вектор действия которых расположен латеральнее центра вращения опорного тазобедренного сустава. Их работа возможна только при жестком блокировании поясничного отдела позвоночника и пояснично-тазового перехода тазово-реберными и тазово-поясничными мышцами.
Особенности мышечных взаимодействий и уточнение формулирования условий сохранения горизонтального равновесия таза требуют дополнительных исследований.
Целью данной работы является изучение работы мышц тазового пояса при обеспечении горизонтального равновесия таза.
Материалы и методы
В работе использован метод математического моделирования условий сохранения равновесия при изменении переменных параметров системы.
В основу расчетов положена концепция сохранения горизонтального равновесия таза за счет работы исполнительного механизма в виде мышечного аппарата, посредством тяговых усилий, развиваемых отдельными мышцами. Регулирование действий исполнительного механизма осуществляется центральной нервной системой, которая генерирует управляющие сигналы, представляющие собой функции регулирования, изменяющиеся во времени. Различные рецепторы осуществляют как внешний (информация об окружающей среде и положении тела в ней), так и внутренний контроль (состояние самой системы и ее элементов). На основании данных системы контроля вырабатываются коэффициенты, влияющие на величины функций регулирования.
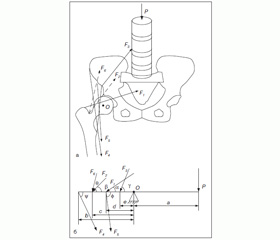
Для выяснения вопроса, каким образом поддерживается горизонтальное равновесие таза при одноопорном стоянии, мы составили схему соответствующих мышечных усилий (рис. 1), где выделены все мышцы тазового пояса, вектор действия которых расположен латеральнее центра вращения таза (центра тазобедренного сустава).
/137/137_6.jpg)
Мы сознательно внесли в расчетную схему не только облигатные мышцы-абдукторы — малую и среднюю ягодичные мышцы и мышцу, натягивающую широкую фасцию, но и все факультативные абдукторы, каким бы малым ни был их вклад в функцию отведения. К этим факультативным абдукторам мы отнесли грушевидную, подвздошно-поясничную, портняжную мышцы, прямую порцию четырехглавой и переднюю порцию большой ягодичной мышцы, вектор действия которых находится латеральнее центра вращения таза, а следовательно, эти мышцы действуют как абдукторы. Для удобства расчета силы действия мышц мы построили соответствующую расчетную схему, приведенную на рис. 1б, где учтены величины плеча каждой силы и углы действия соответствующих сил.
Результаты исследования
Согласно законам механики, система находится в равновесии, когда сумма всех сил, действующих на систему, равна 0 и сумма всех моментов сил, действующих на систему, тоже равна 0:
/137/137.jpg)
Составим уравнения равновесия для нашей системы.
Условие равновесия сил:
/137/137_2.jpg)
или
/137/137_3.jpg)
Условие равновесия моментов:
/137/137_4.jpg)
или
/137/137_5.jpg)
или
/138/138.jpg)
Для определения возможностей регулирования системы при изменении условий сохранения равновесия (регулирование равновесия в критической ситуации), представим функцию (6) в общем виде:
/138/138_2.jpg)
/138/138_3.jpg)
Нормальное значение функции f 0 будет выглядеть так:
/138/138_4.jpg)
Измененное значение функции запишем в виде:
/138/138_5.jpg)
Подставим измененные значения параметров функции из выражения (8) в выражение (10) и получим следующее выражение:
/138/138_6.jpg)
При этом функция равновесия сохраняется (критическое регулирование), следовательно, нормальное значение функции равновесия и его измененное значение тождественны:
/138/138_7.jpg)
Подставив выражения нормального и измененного значений функции из выражений (9) и (11) в выражение (12) и выполнив соответствующие преобразования, получим окончательное условие тождественности нормального и измененного значений функции равновесия:
/138/138_8.jpg)
В общем виде данное уравнение можно записать следующим образом:
/138/138_9.jpg)
Таким образом, мы приходим к пониманию того, что уравнение (14) имеет бесконечное количество решений, так как недостаток функции одного или нескольких элементов системы может быть компенсирован изменением (коррекцией) функции других элементов. Иными словами, организм обладает огромным запасом компенсаторных возможностей, позволяющих обеспечить нормальную функцию опорно-двигательной системы, в частности горизонтальное равновесие таза.
Выясним, какое значение имеют изложенные нами принципы в процессе обеспечения равновесия. С этой целью вернемся к уравнению (14) равновесия таза в общем виде:
/138/138_10.jpg)
а также к исходному уравнению (6) равновесия таза:
/138/138_11.jpg)
Если сравнить эти два уравнения, можно определить, что в качестве переменных выступают величины сил:
/138/138_12.jpg)
А роль параметров играют величины плеч рычагов и углы действия этих сил, т.е. геометрические размеры костных фрагментов тазобедренного сустава:
/138/138_13.jpg)
Можно легко представить, что диапазон регулирования величины мышечной силы значительно превышает диапазон изменения угла ее действия и тем более диапазон изменения плеча ее приложения:
/138/138_14.jpg)
Если учесть тот факт, что рассматриваемые в уравнении (16) и (17) функции являются производными по времени, то:
/138/138_15.jpg)
Проведенные нами расчеты позволили сделать вывод, что главную роль в обеспечении равновесия таза при одноопорном стоянии играют именно мышцы. Чем шире диапазон их силовых воздействий, тем шире диапазон регулирования системы в пределах сохранения горизонтального равновесия таза. Величины плеч приложения мышечных усилий играют второстепенную роль, так как диапазон их изменений за счет перемещения таза очень ограничен.
Рассмотрим далее варианты решения уравнения равновесия таза.
Для этого воспользуемся данными Х.А. Янсона [3] о величинах тяговых усилий мышц, участвующих в стабилизации таза, а также о величинах плеч приложения этих усилий и углов действия мышц, исходя из расчетной схемы. Цифровые данные представлены в табл. 1.
Для определения величины веса тела человека, действующего на таз, воспользуемся данными И.Ф. Образцова [4] о весовых соотношениях различных сегментов тела человека Согласно этим данным вес верхней половины туловища и неопорной конечности составляет 0,7062 веса тела.
Если принять вес тела равным 70 кг, то вес, действующий на опорную конечность при одноопорном стоянии, будет составлять вес верхней части тела плюс вес нижней конечности:
/139/139.jpg)
или величина силы, действующей на таз, будет составлять:
/139/139_2.jpg)
Зададимся величиной плеча действия силы тяжести a = 0,07 м.
Зададимся величинами углов действия мышечных сил, представленных в табл. 1.
/139/139_4.jpg)
Подставим соответствующие числовые значения величин плеч и углов действия мышечных сил в уравнение (16):
/139/139_3.jpg)
или
/139/139_5.jpg)
Рассмотрим вариант решения уравнения, при котором предположим, что каждая мышца или группа мышц в любой момент времени воздействуют на систему силой, пропорциональной величине максимально возможной силы, развиваемой соответствующей мышцей или группой мышц. Для этого на основании данных табл. 1 выведем коэффициент пропорциональности для каждой мышцы относительно величины силы тяжести:
/139/139_6.jpg)
Подставим эти значения в уравнение (23):
/139/139_7.jpg)
Отсюда получим значение силы F:
/139/139_8.jpg)
Подставив значение силы F в равенство (20), получим значения величин сил, которые необходимо развить соответствующим мышцам для выполнения условий равновесия таза при одноопорном стоянии. Результаты расчета приведены в табл. 2.
/140/140.jpg)
Из расчетов следует, что в данном случае все мышцы, развивая пропорциональное своей площади сечения напряжение, без труда обеспечивают условие горизонтального равновесия таза, т.е. требуемое для равновесия таза усилие меньше максимального усилия, развиваемого каждой мышцей. При этом требуемое для сохранения горизонтального равновесия таза усилие в 3–4 раза меньше величины максимально возможных усилий, развиваемых соответствующими мышцами. Это говорит о том, что все мышцы имеют достаточно большой резерв по величине развиваемых усилий при обеспечении равновесия таза, что может быть использовано организмом для нормального и критического регулирования.
Обсуждение полученных результатов
Как видно из расчетов, облигатные абдукторы (малая и средняя ягодичные мышцы и мышца, натягивающая широкую фасцию) обеспечивают момент силы, равный 80 Н•м, что чуть более чем в 2 раза превышает момент силы гравитации при спокойном одноопорном стоянии (34,6 Н•м). Достаточно ли этого при динамическом нагружении, когда нагрузка на опорную конечность возрастает в 3–4 раза, а по некоторым данным и более? По-видимому, нет. А включение дополнительных факультативных абдукторов, к которым мы отнесли грушевидную, подвздошно-поясничную, портняжную мышцы, прямую порцию четырехглавой и переднюю порцию большой ягодичной мышцы, вектор действия которых расположен латеральнее центра вращения таза, помогает решить и эту проблему. Суммарное пропорциональное сокращение факультативных абдукторов позволяет обеспечить момент силы в 66,8 Н•м, что ненамного меньше момента облигатных абдукторов. Суммарный момент силы всех абдукторов составит 146,8 Н•м, что более чем в 4 раза превышает момент силы гравитации. А исходя из того положения, что синергизм в работе мышц усиливает суммарную силу, можно с уверенностью говорить, что суммарное действие всех абдукторов обеспечит надежное сохранение горизонтального равновесия таза даже в условиях динамического нагружения.
Приведенный нами вариант можно рассматривать как условие регулирования равновесия таза в норме.
Заключение
Таким образом, горизонтальное равновесие таза обеспечивается сочетанной работой облигатных и факультативных абдукторов. Факультативные абдукторы развивают момент силы, почти в 2 раза превышающий момент силы гравитации, а совместно с облигатными абдукторами обеспечивают момент силы, превышающий таковой гравитации более чем в 4 раза. Это позволяет рассматривать факультативные абдукторы как важный механизм компенсации (резерв регулирования) при экстремальных динамических нагрузках.
1. Pauwels F. Derschenkelhalsbruch ein mechanisches Problem. — Stuttgart, 1935. — 325 s.
2. Inman V.T. Functional Aspects of the Hip // JBJS. — 1947, 29-A. — № 3. — P. 607-619.
3. Янсон Х.А. Биомеханика нижней конечности человека / Х.А. Янсон. — Рига: Зинатне, 1975. — 324 с.
4. Образцов И.Ф. Проблемы прочности в биомеханике: Учебное пособие для техн. и биол. спец. вузов / И.Ф. Образцов, И.С. Адамович, А.С. Барер [и др.]. — М.: Высшая школа, 1988. — 311 с.